
Une solution non chimique et robotisée de lutte contre les ravageurs de culture
Dans la revue AgriEngeneering, des chercheurs présentent les résultats de l’expérimentation, en conditions réelles, d’un prototype robotique qui détecte et neutralise par laser des pucerons (parmi les plus importants ravageurs des cultures). Dans le cadre du projet GreenShield, cette équipe associant 4 laboratoires et une startup avait déjà établi la preuve de concept d’un module de détection-neutralisation (DNM) de nuisibles. L’objectif ici est d’expérimenter le module embarqué sur un robot en conditions réelles, d’en détailler les solutions techniques ainsi que les résultats obtenus.
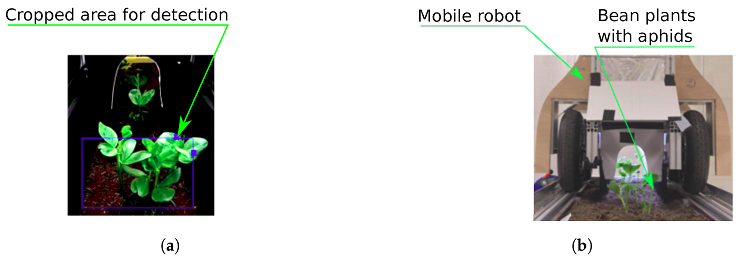
Ce prototype, posé sur des rails pour l’expérimentation, enjambe un rang de culture (figure ci-dessous). Le module DNM embarqué sur le robot est composé d’une caméra 3D qui capture des images ; des techniques d’analyse associées à de l’intelligence artificielle (deep learning) permettent ensuite d’identifier et de localiser les pucerons avec une erreur maximale de 3 mm. Les coordonnées d’emplacement sont envoyées aux commandes du laser et traitées par un algorithme calculant le chemin optimal pour minimiser la distance globale parcourue par le faisceau, réduisant ainsi le temps nécessaire à la destruction de toutes les cibles. Les pucerons visés sont ensuite neutralisés. L’énergie du laser a été déterminée afin d’éliminer le parasite sans affecter les plantes hôtes. Le robot a parcouru la rangée de culture à une vitesse de 3 cm/s et détecté 50 % des pucerons de différentes lignées, dont 90 % ont été neutralisés.
Configuration expérimentale du prototype robotique embarquant le module de détection-neutralisation (DNM)
 Source : AgriEngineering
Source : AgriEngineering
Lecture : en (a), image acquise par la caméra située sous le robot, la zone bleue correspond à la zone analysée et les carrés bleus désignent l’emplacement des pucerons identifiés. En (b), vue de face du robot enjambant une rangée de plants d’haricots avec pucerons.
Pour en faire la première solution robotique non chimique de lutte contre les ravageurs commercialisable, les auteurs identifient plusieurs limites et des développements à conduire. Le robot mobile embarquant le module DNM doit être capable de parcourir de manière autonome les parcelles dans leur intégralité. La détection et la neutralisation des ravageurs doivent pouvoir se réaliser à une vitesse minimale de 29 cm/s (correspondant au traitement d’1 ha en 24 h). De plus, la robustesse des composants matériels doit être testée sous diverses conditions climatiques. Enfin, les phases de détection et de ciblage du laser doivent encore être améliorées, pour augmenter le taux de neutralisation, et modifiées pour s’adapter aux différentes conditions de luminosité ainsi qu’aux irrégularités du terrain.
Jérôme Lerbourg, Centre d’études et de prospective
Source : AgriEngineering

